Topographic and Geomorphological Mapping and
Analysis of the Chang’E-4 Landing Site on the Far
Side of the Moon
Bo Wu, Fei Li, Han Hu, Yang Zhao, Yiran Wang, Peipei Xiao, Yuan Li, Wai Chung Liu,
Long Chen, Xuming Ge, Mei Yang, Yingqiao Xu, Qing Ye, Xueying Wu, and He Zhang
Abstract
The Chinese lunar probe Chang’E-4 successfully landed in the
Von Kármán crater on the far side of the Moon. This paper
presents the topographic and geomorphological mapping and
their joint analysis for selecting the Chang’E-4 landing site
in the Von Kármán crater. A digital topographic model (
DTM
)
of the Von Kármán crater, with a spatial resolution of 30 m,
was generated through the integrated processing of Chang’E-2
images (7 m/pixel) and Lunar Reconnaissance Orbiter (
LRO
)
Laser Altimeter (
LOLA
) data. Slope maps were derived from
the
DTM
. Terrain occlusions to both the Sun and the relay
satellite were studied. Craters with diameters
≥
70 m were
detected to generate a crater density map. Rocks with diam-
eters
≥
2 m were also extracted to generate a rock abundance
map using an
LRO
narrow angle camera (
NAC
) image mosaic.
The joint topographic and geomorphological analysis identi-
fied three subregions for landing. One of them, recommended
as the highest-priority landing site, was the one in which
Chang’E-4 eventually landed. After the successful landing of
Chang’E-4, we immediately determined the precise location of
the lander by the integrated processing of orbiter, descent and
ground images. We also conducted a detailed analysis around
the landing location. The results revealed that the Chang’E-4
lander has excellent visibility to the Sun and relay satellite;
the lander is on a slope of about 4.5° towards the southwest,
and the rock abundance around the landing location is al-
most 0. The developed methods and results can benefit future
soft-landing missions to the Moon and other celestial bodies.
Introduction
On 3 January 2019, the Chinese lunar probe Chang’E-4, carry-
ing the Jade Rabbit-2 lunar rover, successfully landed in the
Von Kármán crater in the northwestern South Pole-Aitken
(
SPA
) basin on the far side of the Moon (Figure 1). Chang’E-4
was the first spacecraft to make a soft landing on the lunar far
side. The Chang’E-4 lander and the Jade Rabbit-2 rover are
now exploring the surface and subsurface of the Von Kármán
crater’s mare-covered floor with their onboard scientific in-
struments. Their tasks include investigating the compositions
of mare basalt and the subsurface structure of the regolith of
this far side region (Wu
et al.
2017), and finding clues that
could provide insight into the early geologic history of the
Moon (Wilhelms, John, and Trask 1987; Huang
et al.
2018; Li
et al.
2019; Di
et al.
2019).
Bo Wu, Han Hu, Yiran Wang, Peipei Xiao, Yuan Li, Wai
Chung Liu, Long Chen, and Xuming Ge are with the
Department of Land Surveying and Geo-Informatics, The
Hong Kong Polytechnic University, Hung Hom, Kowloon,
Hong Kong (
).
Fei Li, Yang Zhao, Mei Yang, Yingqiao Xu, Qing Ye, Xueying
Wu, and He Zhang are with the China Academy of Space
Technology, 104 Youyi Street, Haidian, Beijing, P.R. China
(
).
Photogrammetric Engineering & Remote Sensing
Vol. 86, No. 4, April 2020, pp. 247–258.
0099-1112/20/247–258
© 2020 American Society for Photogrammetry
and Remote Sensing
doi: 10.14358/PERS.86.4.247
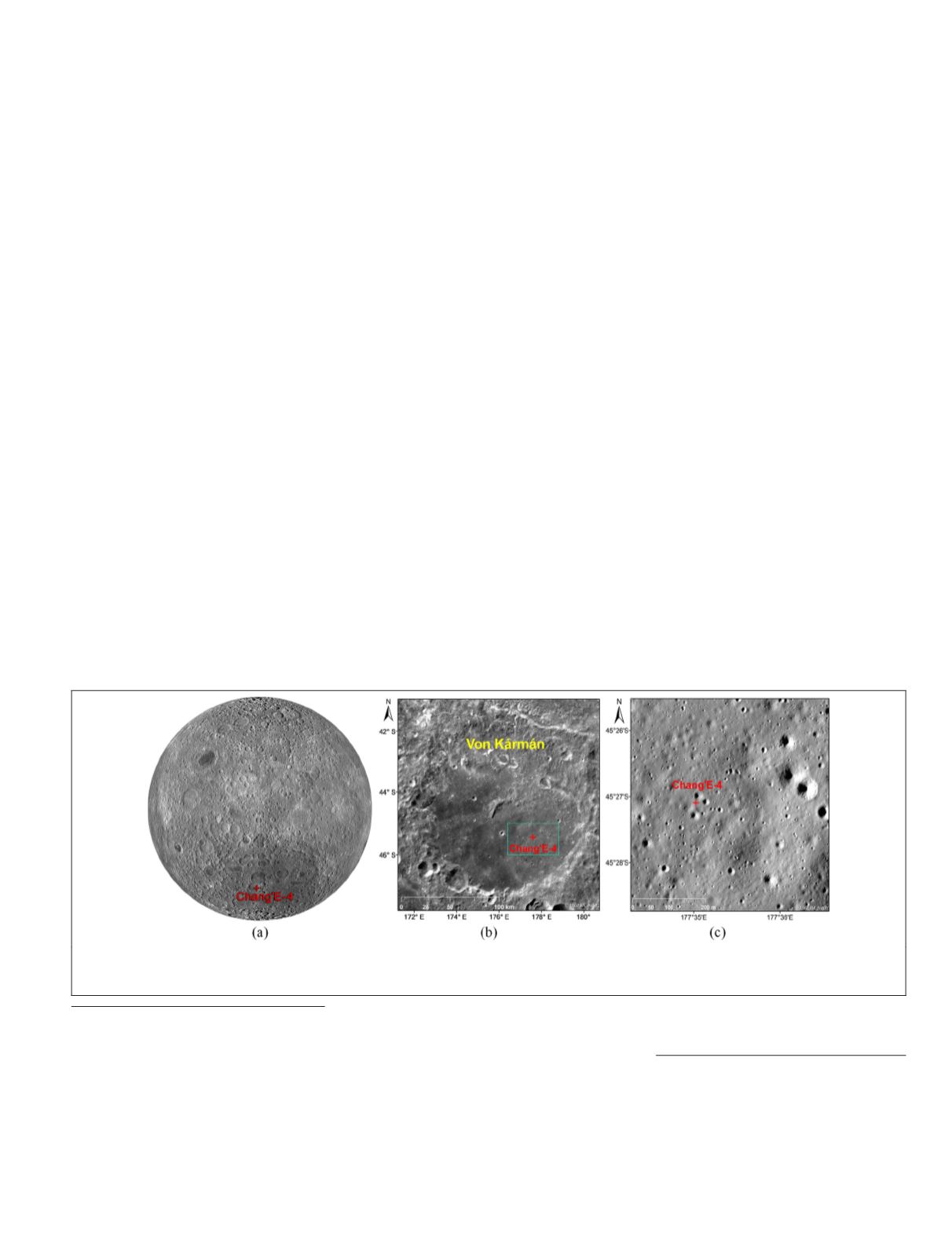
Figure 1. The Chang’E-4 landing site. (a) The landing site shown in a global view of the far side of the Moon; (b) an enlarged
view of the landing site inside the Von Kármán crater shown in a Chang’E-2 image, with the green box indicating the targeted
landing region; and (c) a further enlarged view of the landing site shown in a
LRO NAC
image.
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
April 2020
247


