Difference between Using Multiple Nearest Neighbors and Using Only the
First Nearest Neighbor
As mentioned in the introduction, only approximately 60
percent correct matches appear in the first nearest neighbor.
Thus, the ability to consider multiple nearest neighbors is
important to a candidate matches filter algorithm. To deter-
mine the difference between using multiple nearest neighbors
and using only the first nearest neighbor, Figure 8 presents a
comparison between using the nearest neighbor distance ratio
(0.8 is used in the test) (Lowe, 2004) and using our algorithm.
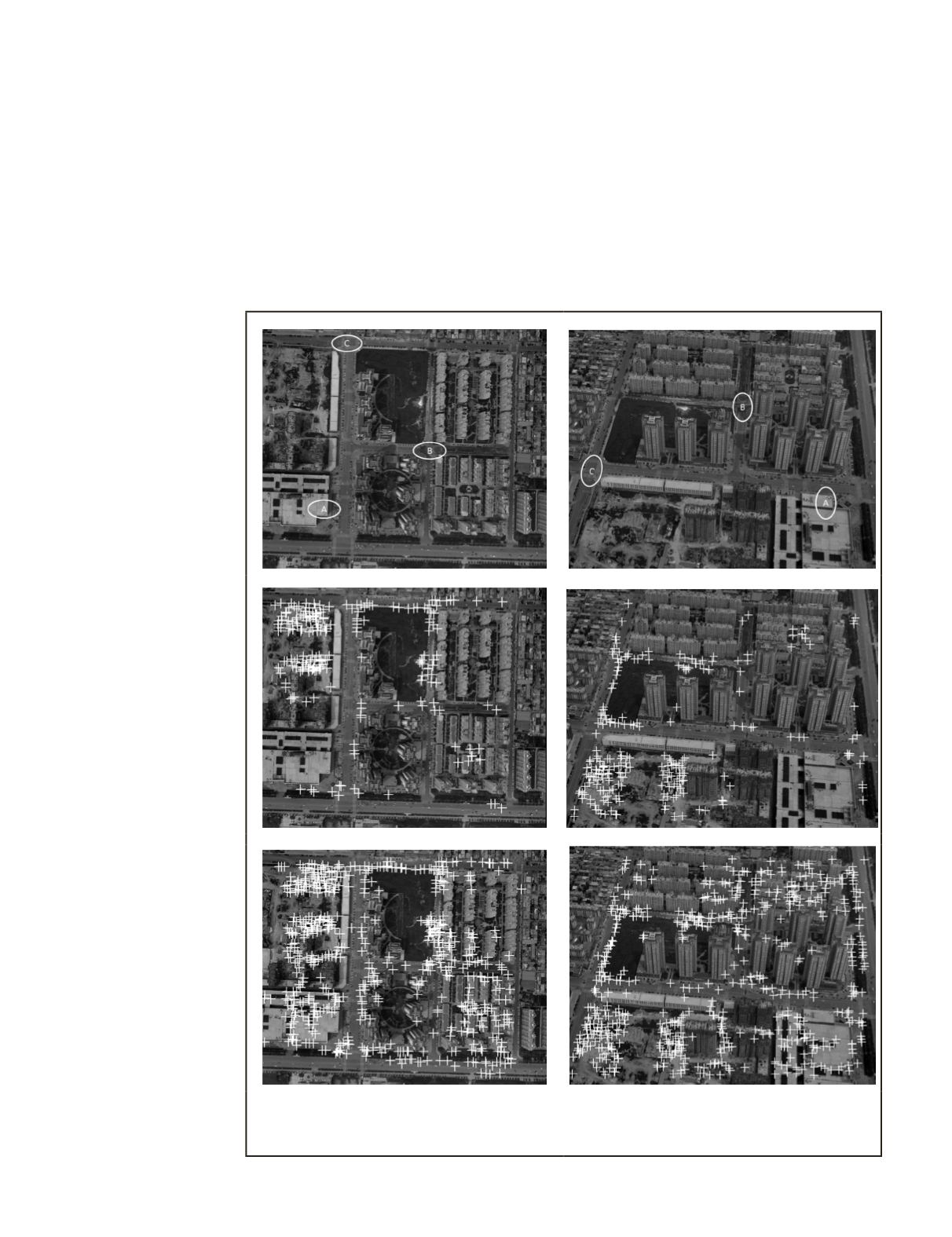
The images were captured by the five-view camera TOP-
DC-5. The images on the left side of Figure 8 were captured by
the nadir lens, and the images on the right were captured by
the 45-degree tilt lens. Three corresponding areas are marked
out as A, B, and C in the im-
ages. The image is an urban
area with many tall build-
ings inside; several pixels
are occluded by the build-
ings in the second image.
Figure 8a shows the original
images. Figure 8b shows the
matching result using the
nearest neighbor distance
ratio algorithm. Figure 8c
shows the matching result
using our algorithm. Ad-
ditional correct matches
are found by our algorithm,
although some small error
matches remain. Neverthe-
less, finding additional
correct matches results in
a much higher number of
tie-points, with more than
three observations within
the working block. This
result is important for the
bundle adjustment. Fur-
thermore, those small error
matches can be eliminated
during the bundle adjust-
ment.
Difference between using
LMedS Directly and Using Our
Algorithm as a preprocessing
Step before LMedS
The
LMedS
works effectively
if the outlier is not highly
significant. Thus, to show
the ability of our algorithm,
five test data are collected
to make the comparison.
They are chosen consid-
ering their difficulty in
matching; furthermore, the
inlier of initial matches are
all less than 10 percent.
These five test data are
aerial images with ground
references, that is, the ori-
entation parameters of the
images and the elevation of
the scene are known. Thus,
the correctness of a match
can be known by comparing
the projection coordinate
xp
and the image coordinate
xi
of a match point. In our test, a match is taken as correct if the
Euclidean distance between
xp,
and
xi
is less than 2 pixels.
For these five test data, using
LMedS
directly to remove the
outliers all failed. However, if we use our algorithm as a pre-
processing step before using the
LMedS
, then the outliers can
be removed successfully. This is because our algorithm can
remove most outliers while protecting most inliers.
Table 1 shows the performance of our algorithm. The ratio
of correct matches in initial matches is shown in the sixth col-
umn,
Ratio 1
of Table 1. For each feature point, eight nearest
neighbors are retained at the beginning; thus, the number of
initial matches in column
A1
is the number of feature points
times 8. The total number of correct matches in the initial
matches is provided in column
B1
. The number of matches
(a)
(b)
(c)
Figure 8. Difference between using multiple nearest neighbors and using only the first nearest neighbor:
(a) The original image pairs, (b) The matching result of using only the first nearest neighbor, and (c) The
matching result of using multiple nearest neighbors.
564
July 2016
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


