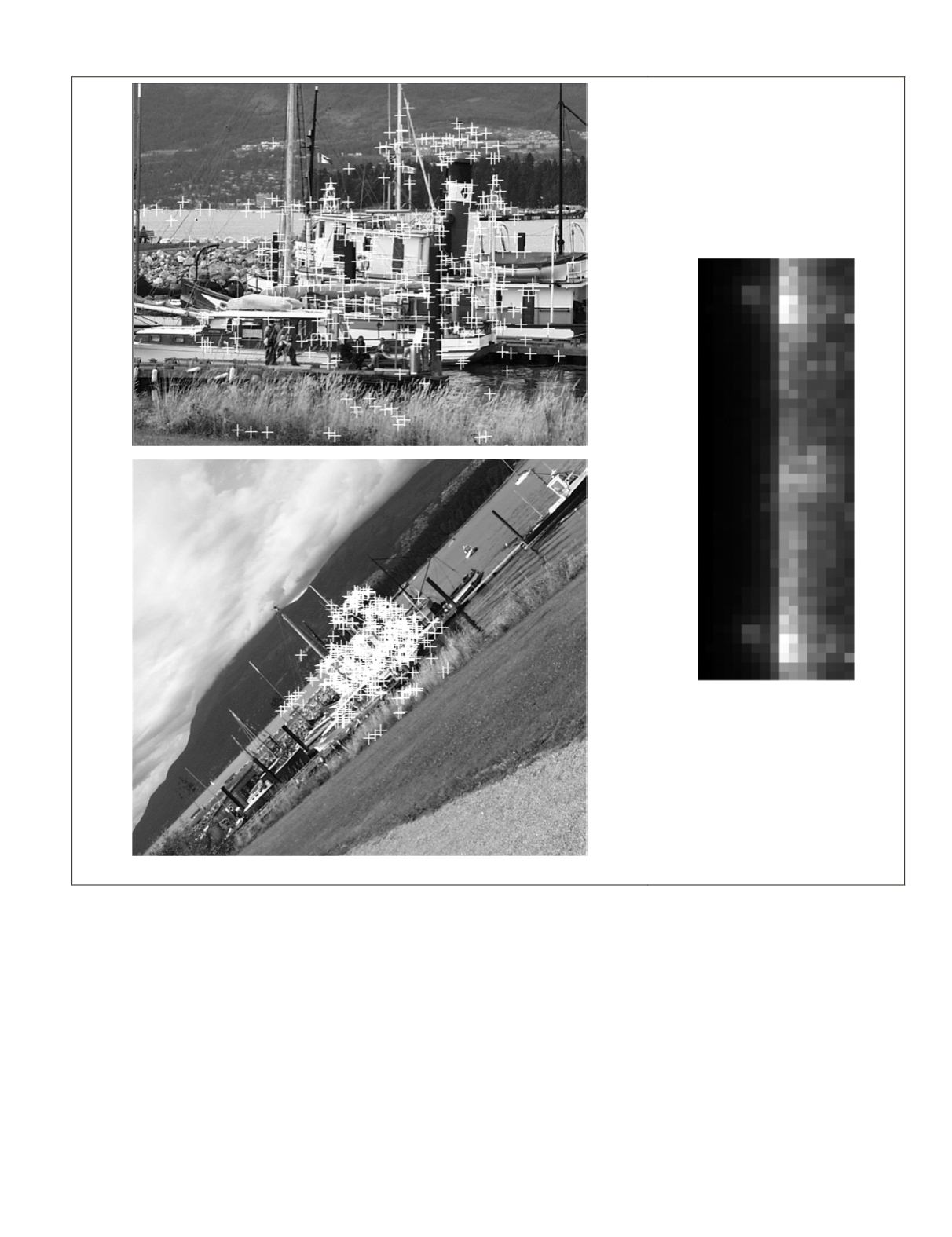
Figure 12. Images with large-scale difference (boat-img1 and boat-img6, the matching result, and the distribution of votes).
images vary by a larger range. Nevertheless, the initial match-
es can be filtered using our algorithm, and a good matching
result may be obtained.
Figure 12 shows the images with large-scale difference.
The images are boat-img1 and boat-img6 from the website
/
.
Conclusions
This paper presents an effective preprocessing method for
finding consistent correspondences between two sets of
feature matches. The method is based on the idea of Hough
transform, thereby making it robust. Multiple nearest neigh-
bors are allowed for each feature point to act as the initial
candidate matches. In this manner, many potential matches
(not the top one nearest neighbor) can be found. The weighted
voting strategy is employed in the algorithm, and it can fur-
ther improve the robustness.
The occlusion problem is normally seen in close-range or
oblique images, and it will affect the ratio of correct matches
among initial candidate matches. Considering that some
image areas disappear in another image, feature points in
such areas cannot find the correct corresponding points, and
matches formed by these points become noise (i.e., outli-
ers). Serious occlusion will affect the saliency of the peak
of voting. Our method functions effectively as long as the
ratio of inliers is not extremely low. However, our method
is unsuitable for working with the rigorous transformation
model between images, thereby necessitating a postprocess-
ing method that uses the epipolar geometry constraint. In the
future, parallel computing will be adopted for the algorithm
to improve its time efficiency.
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
July 2016
569


