Large-Scale Supervised Learning For
3D Point Cloud Labeling: Semantic3d.Net
Timo Hackel, Jan D. Wegner, Nikolay Savinov, Lubor Ladicky, Konrad Schindler, and Marc Pollefeys
Abstract
In this paper we review current state-of-the-art in 3D point
cloud classification, present a new 3D point cloud classifica-
tion benchmark data set of single scans with over four billion
manually labeled points, and discuss first available results
on the benchmark. Much of the stunning recent progress in
2D image interpretation can be attributed to the availability
of large amounts of training data, which have enabled the
(supervised) learning of deep neural networks. With the data
set presented in this paper, we aim to boost the performance
of
CNNs
also for 3D point cloud labeling. Our hope is that this
will lead to a breakthrough of deep learning also for 3D (geo-)
data. The semantic3D.net data set consists of dense point
clouds acquired with static terrestrial laser scanners. It con-
tains eight semantic classes and covers a wide range of urban
outdoor scenes, including churches, streets, railroad tracks,
squares, villages, soccer fields, and castles. We describe our
labeling interface and show that, compared to those already
available to the research community, our data set provides
denser and more complete point clouds, with a much higher
overall number of labeled points. We further provide descrip-
tions of baseline methods and of the first independent sub-
missions, which are indeed based on
CNNs
, and already show
remarkable improvements over prior art. We hope that seman-
tic3D.net will pave the way for deep learning in 3D point
cloud analysis, and for 3D representation learning in general.
Introduction
Neural networks have made a spectacular comeback in im-
age analysis since the seminal paper of (Krizhevsky
et al.,
2012), which revives earlier work of Fukushima (1980) and
LeCun
et al.,
(1989). Especially deep convolutional neural
networks (
CNNs
) have quickly become the core technique for a
whole range of learning-based image analysis tasks. The large
majority of state-of-the-art methods in computer vision and
machine learning now include
CNNs
as one of their essential
components. Their success for image-interpretation tasks is
mainly due to (i) easily parallelisable network architectures
that facilitate training from millions of images on a single
GPU, and (ii) the availability of huge public benchmark data
sets like ImageNet (Deng
et al.,
2009; Russakovsky
et al.,
2015) and Pascal
VOC
(Everingham
et al.,
2010) for RGB im-
ages, or SUN
RGB-D
(Song
et al.,
2015) for
RGB-D
data.
While
CNNs
have been a great success story for image inter-
pretation, they have not yet made a comparable impact for 3D
point cloud interpretation. What makes supervised learning
hard for 3D point clouds is the sheer size of millions of points
per data set, and the irregular, not grid-aligned, and in places
very sparse distribution of the data, with strongly varying
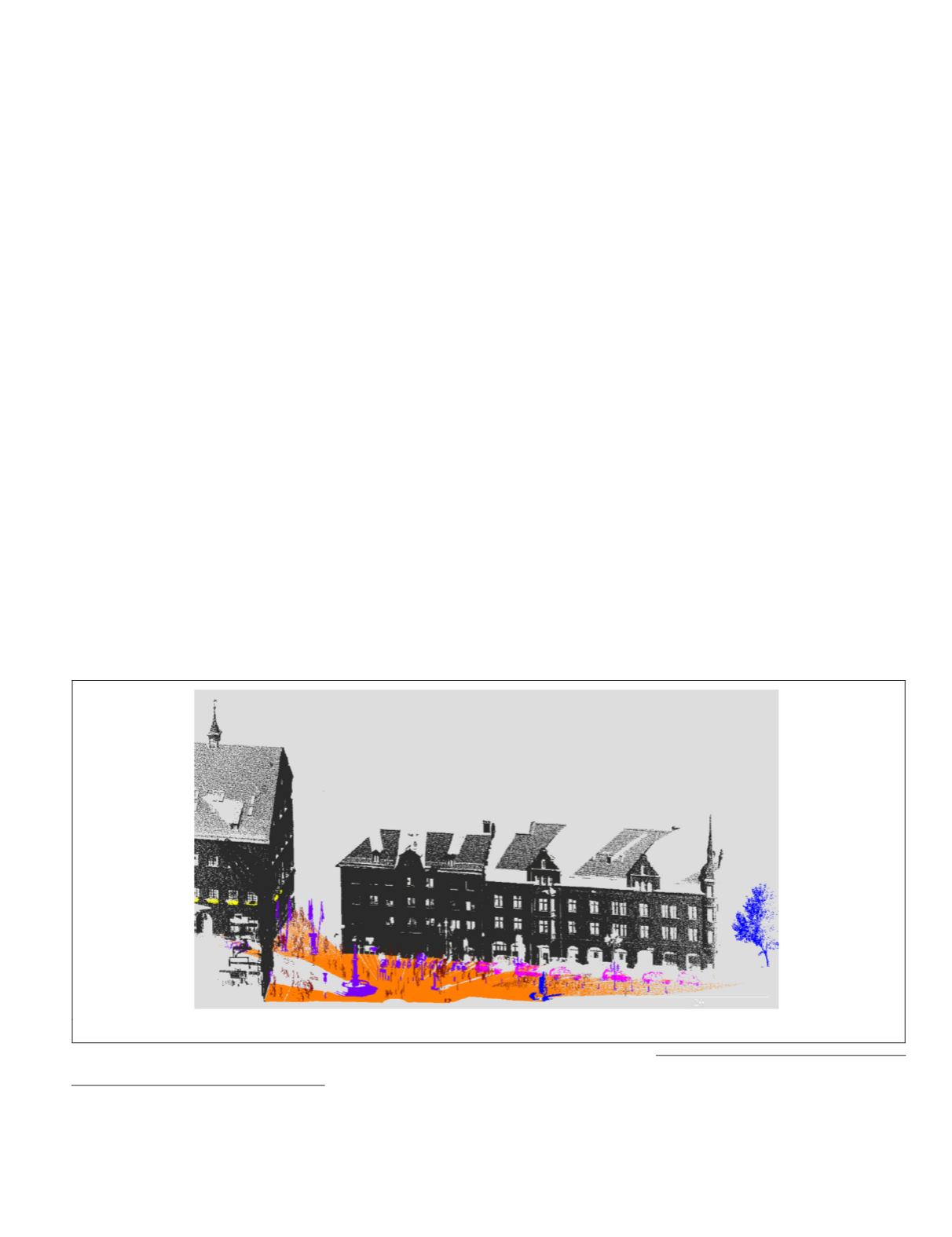
point density (Figure 1).
While recording point clouds is nowadays straight-
forward, the main bottleneck is to generate enough manu-
ally labeled training data, needed for contemporary (deep)
Timo Hackel, Jan D. Wegner, and Konrad Schindler are with
IGP, ETH Zurich, Switzerland (
).
Nikolay Savinov, Lubor Ladicky, and Marc Pollefeys are with
CVG, ETH Zurich, Switzerland.
Photogrammetric Engineering & Remote Sensing
Vol. 84, No. 5, May 2018, pp. 297–308.
0099-1112/18/297–308
© 2018 American Society for Photogrammetry
and Remote Sensing
doi: 10.14358/PERS.84.5.297
Figure 1. Example point cloud from the benchmark dataset, where colors indicate class labels.
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
May 2018
297


