Comparing FMCW and
Linear Mode – Based
Scanning and Ranging
Objects, Materials and Distance
FMCW technology was tested and compared to lin-
ear mode lidar using an HRS-3D scanner designed
and developed by Blackmore Sensors and Analyt-
ics of Bozeman, Montana. The system used was a
1 watt, Class IIIb laser scanner possessing a 360
o
horizontal and 60
o
vertical field-of-view (FOV).
Additional specifications of the HRS-3D included
a maximum pulse repetition rate of 48 kHz and a
beam divergence for the laser (wavelength emission
of 1.55 μm) is 0.1 mrad. Comparisons of the FMCW
target data were made against a VZ-400 commer-
cial scanning system built by RIEGL. The VZ-400
is a linear mode, pulsed system possessing a Class
I laser with a 360
o
horizontal and a 100
o
verti-
cal FOV. The pulse repetition rate for the VZ-400
is 300 kHz and its beam divergence is 0.35 mrad.
The laser emission frequency is also 1.55 μm. Several
scanning scenarios were conducted to evaluate FMCW
capabilities for range resolution, Doppler motion, and
topographic rendition (e.g., number of points returned
from ranges exceeding 500m). The two pieces of equip-
ment were stationed close but not at the exact location.
A range ambiguity test was conducted first to evaluate
the FMCW capabilities for resolving intricate object
details. For this test, two wooden frame boxes were
constructed that contained various construction com-
ponents (e.g., cross-bracing and framing) and materials
such as netting (Box 1) and a calibration test pattern
background (Box 2) in Figure 4. One box was placed at
220 meters in range (Box 1) and the other at 185 meters
in range (Box 2).
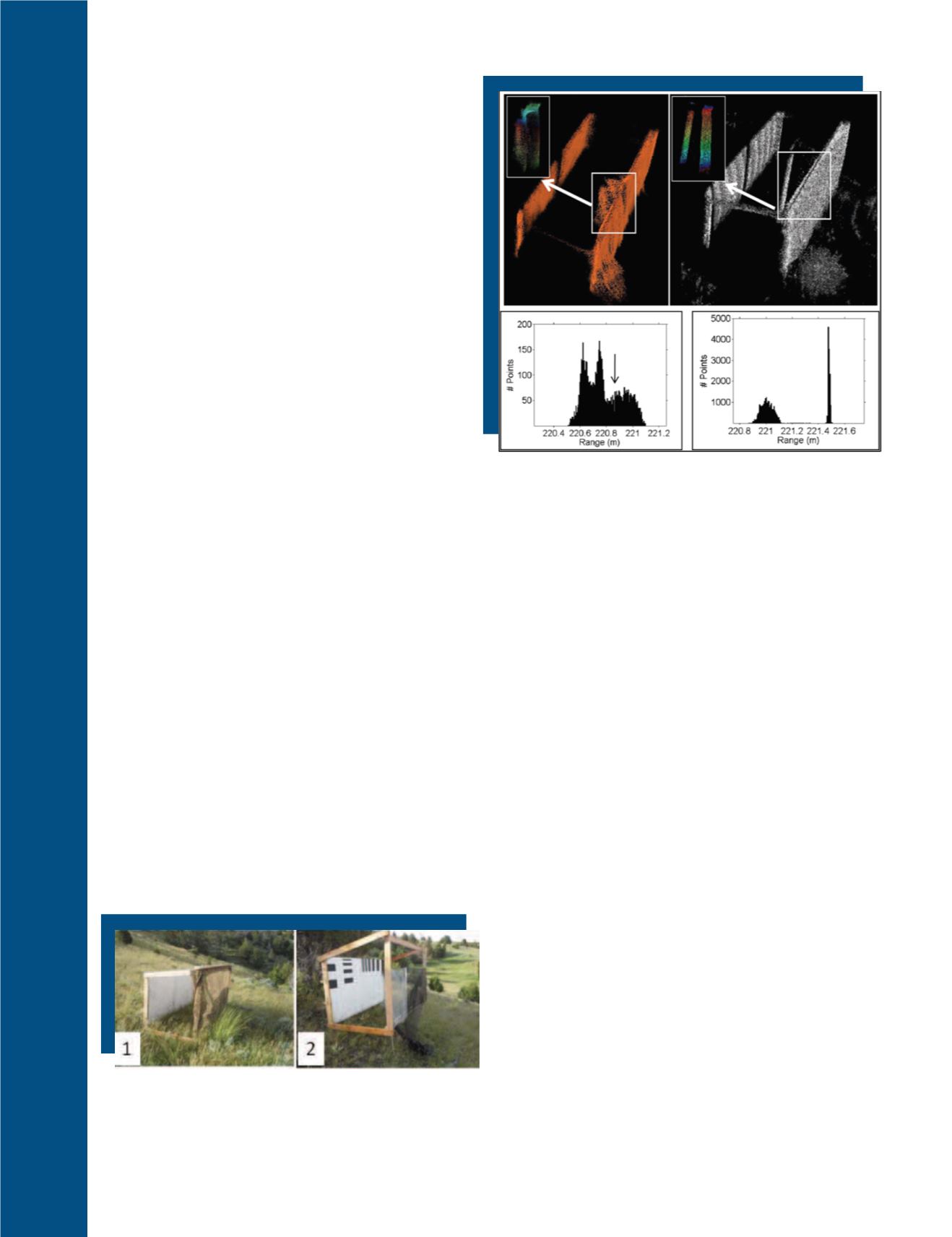
The resulting point clouds from both systems were eval-
uated and differences were gleaned from subsets of the
data with regard to the rendered details for each box
and its associated materials. Figure 5 provides the point
cloud results from the linear mode VZ-400 (left) and
the FMCW HRS-3D system (right) for Box 1. This Fig-
ure also provides the associated histogram (bottom) for
range return points and their distribution shown under
the point cloud. The insets illustrated on the point cloud
figures represent areas analyzed to produce the histo-
grams and point returns. The VZ-400 range return his-
togram shows two range return peaks at approximately
220.6 m and 220.75 m, and a smaller, less distinct peak
at approximately 220.95 m. The first two peaks are due
to mesh netting on the left and right side of a wooden
vertical support. However, the netting directly in front
of the support does not appear as a clear return in the
point cloud data. Instead, the returns appear ambiguous
as many are registered between the netting and support
stand. The support stand itself is the ill-defined peak
at 220.95 m (arrow on bottom right histogram). Mean-
while, the HRS-3D returns rendered well-defined sur-
faces for the mesh and associated wooden support. The
netting surface is the first peak at 221 m in the bottom
left histogram of Figure 5. The vertical support is the
sharp peak at 221.5 m. There are a few stray points de-
tected that appear between the netting and vertical sup-
port surfaces in the HRS-3D data. These stray points are
negligible and mainly located between ranges of 221.15
m and 221.35 m. Resulting point clouds and histograms
for Box 2 are shown in Figure 6 and present analysis
of range ambiguity and the comparative offset result-
ing from a double layer of mesh material and associated
wooden supports. As with Box 1, two areas of Box 2 were
extracted to compare the range ambiguities of the two
Figure 4. Boxes of various construction configurations and
materials used to test the range resolution capabilities of
the FMCW technology. Mesh materials incorporated in
both boxes are particularly confounding to linear mode
systems.
Figure 5. Point clouds of Box 1 - (left) VZ-400 linear mode lidar
and (right) FMCW HRS-3D with associated range histograms.
724
November 2017
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


