Tree Crown Identification, Delineation and
Center Estimation from Overhead Imagery:
To determine the horizontal accuracy of the output, the
resulting maps from the Tree crown identification algorithm
were compared to the ground reference dataset of the for-
est grounds (georeferenced lidar data). The lidar data was
examined manually whereby tree stems were picked and
labeled by hand. The handpicked horizontal geolocations of
stems were then compared to the geolocations reported by the
algorithm of the same stems. To estimate the error between
both maps, a nearest neighbor search algorithm was used to
find corresponding point pairs and determine the Euclidean
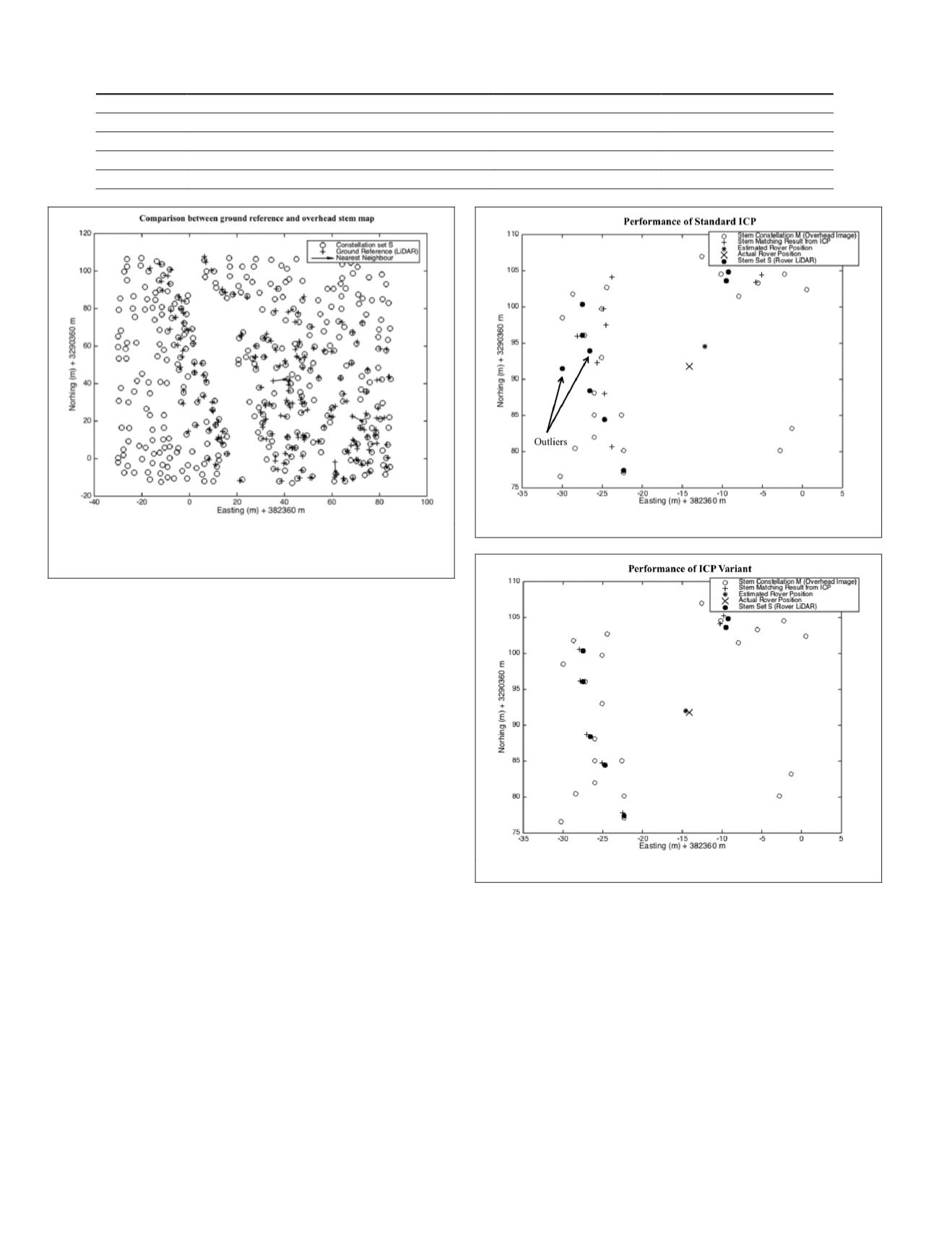
distance error between them. Figure 6 shows a plot of stem
center maps that were automatically estimated from the image
and those hand-labeled from ground lidar data.
Results from the nearest neighbor search indicate 1.35 m
RMSE
(Root Mean Squared Error) between corresponding point
pairs in the two data sets. This error is less than the estimated
2.1 m
RMSE
of the orthophoto used and as such is determined
as a good result. The indicated accuracy of 1.35
RMSE
is treat-
ed as the classification accuracy of the delineation algorithm.
Matching of Tree Centers from Overhead Imagery and Rover Lidar Data:
To demonstrate the performance improvements of the robust
ICP
algorithm compared to the standard approach, both algorithms
were tested with sample data from the Lake Mize site. Figure 7
shows a sample run at a single rover pose. A sparse section of the
constellation map
M
and lidar data
S
was used to facilitate visual
demonstration of the effectiveness of the robust
ICP
algorithm.
The lidar data set
S
had two outliers as shown in Figure 7, which
also shows the result from running the standard
ICP
algorithm
The estimated rover position is off from the actual
GPS
based
position. This is mainly due to the presence of the outliers as de-
noted in Figure 7 that skews the least square fitment and results
in a distance error of 2.71 m compared to the actual
GPS
position.
Figure 8 shows the result after running robust
ICP
with the
same data set. The closeness of both datasets shows that a
good match was found. The outliers were discarded follow-
ing the logic discussed in Table 2 to produce a good match
with a reported average point-pair distance error of 0.37 m
(~1 pixel). It is noted that since the sets
S
and
M
are generated
from two different sensors, it is anticipated that their constitu-
ent points may not exactly lie on top of each other.
The robust
ICP
algorithm has the following properties:
1. The search space is constrained to a 35 m × 35 m box
centered on the last known position of the rover and
projected onto the stem constellation dataset
M
. The
optimum search space size was determined following
an empirical investigation of the accuracy and pro-
cessing-time performance of
ICP
using different search
space sizes and shapes.
2. The
ICP
algorithm always provides a result and produc-
es the best-found match along with a mean error metric
(parameter
E
). Good candidate matches produce low
E
T
able
3. P
roperties
of
I
nput
D
ata
Dataset Type
Properties
Horizontal Accuracy RMS Location of Study Area
Aerial Image 1 Visible, 5000x5000 pixels, 0.3 m resolution
2.1 m
Off-nadir Lower right corner
Aerial Image 2 Visible, 5000x5000 pixels, 0.3 m resolution
2.1 m
Close proximity to nadir
Aerial Image 3 Visible, 8000x8000 pixels, 0.5 m resolution
2 m
Off-nadir, lower right corner
Lidar
5 cm resolution (Average on-ground)
0.01 m
—
Figure 7. Result from running standard ICP.
Figure 8. Result from running variant of ICP.
Figure 6. Nearest neighbor search results from comparing stem
locations in overhead image to those manually estimated from
ground lidar data.
844
November 2015
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


