pre-verified camera parameters C
2
and evaluating them with
various types of evidence that support the model lines-to-
image lines fitting. The supporting evidence of wireframe-
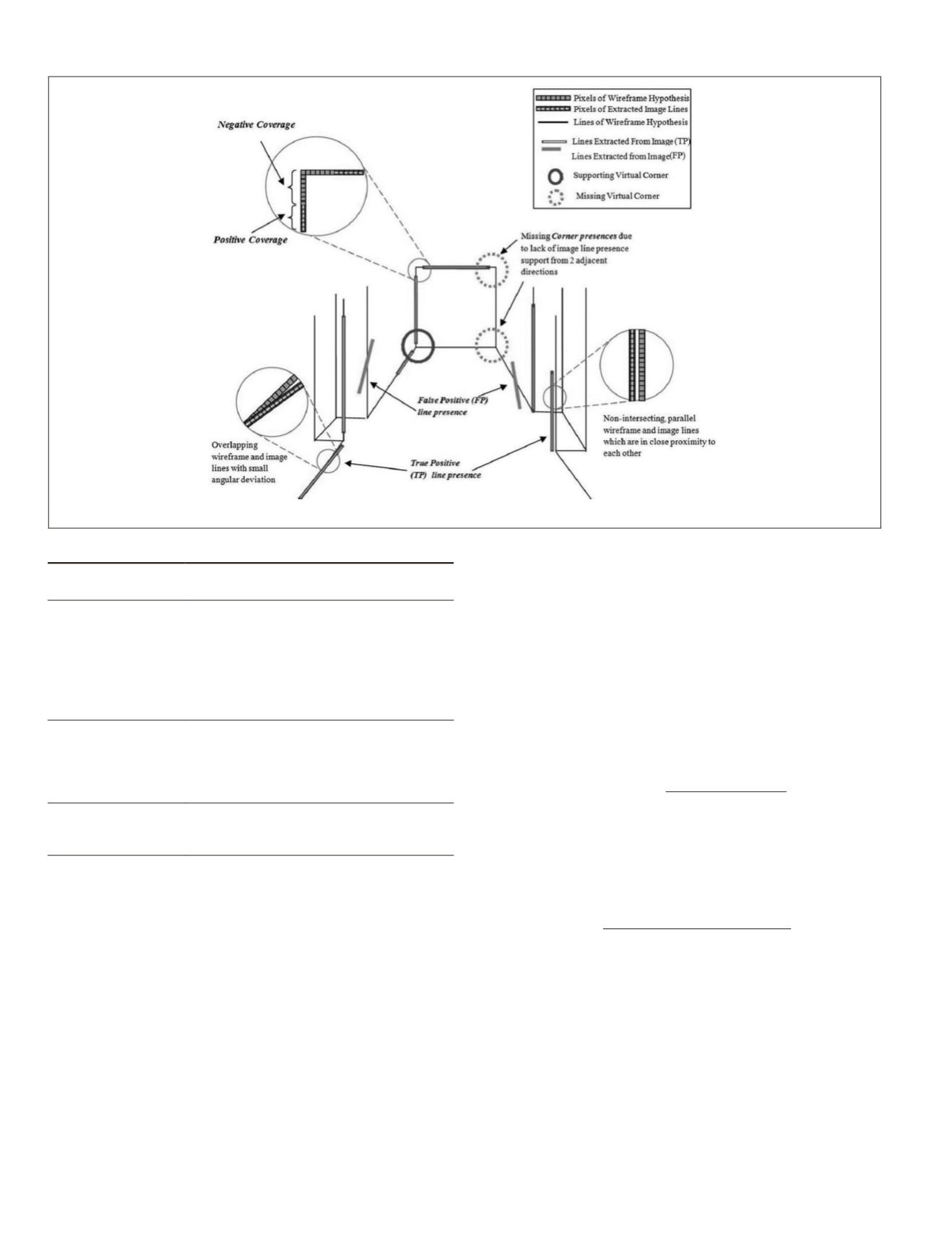
to-image co-registration is based on three measures (Figure
7): (a) physical pixel overlap (“line coverage”); (b) geometric
similarity (“line presence”); and (c) contextual reasoning of
corner associate lines (“corner presence”) (Huertas and Neva-
tia, 1998).
Table 1 is an overview of the various evidence measures
that are considered when selecting a hypothesis winner dur-
ing the verification process. The number of generated camera
parameters hypothesis
C
= {
C
j
}
j
iter
=
1
is equal to the number of
iterations “
iter
” for
LR-RANSAC
. is a hypothesis of camera pa-
rameters, which are computed at the
j
th
iteration of
LR-RANSAC
sampling with given inputs previously described. The inputs
include: (a) entire image line set
LI
; (b) entire wireframe line
set
LM
; and (c) the initial
VP
-based camera parameters. For no-
tational convenience, we omit the superscript
j
of
LR-RANSAC
sampling index in following sections.
The verification of an acceptable wireframe to image fit is
conducted based on the following three individual cues and
their combined evidence into a single weighted measure.
Evidence 1 - Positive and Negative Pixel Coverage
For validating a camera parameter hypothesis
C
, we introduce a
scoring function
SC
of Equation 2, measuring the positive image
pixel support of the overall wireframe coverage with extracted
image lines (Figure 7). Larger positive pixel coverage provides
bigger supports to
C
. We define
LI
′
as a sub-set of
LI
representing
N
image lines (i.e.,
LI
′∈
LI
= {
LI
k
}
N
k
=1
) that intersect with a single
back-projected wireframe line
LM
i
∈
LM
. For a given
LM
i
,
SC
is
the fraction of the
LM
i
pixels that overlap
LI
′.
SC
is in the range
0~1 as it is normalized to the total pixels of
LM
i
.
SC LM LI
PI LM LI
PI LM
i
k
N
i
k
i
,
(
)
(
)
’
(
)
=
=
∑ ∩
1
(2)
where,
PI( )
counts the total number of overlapping line pixels.
The negative evidence
SN
of Equation 3 is defined similarly
to the positive coverage score. It is the ratio of
LM
i
pixels not
covered by
LI
′
pixels relative to the total number of
LM
i
pixels.
SN LM LI
PI LM PI LM LI
PI LM
i
i
k
N
i
k
i
,
(
)
(
)
’
(
)
=
(
)
−
=
∑ ∩
1
(3)
Evidence 2 – Line Presence
SC
and
SN
as proposed in the previous section, allow us to
evaluate the physical overlapping quality of wireframe-to-image
co-registration. However, these functions measure the support-
ing evidences regardless of the line similarity between match-
ing pairs. Thus, the coverage scores measure not only true
positive line pairs, but also false positive ones (Figure 7). To
address this problem, we introduce another scoring function
SP
(see Equation 5), which measures the total degree of geometric
similarity of length and slope between matching pairs to be
evaluated. Higher
SP
scores are assigned to a line pair that is
closer to true positive (showing higher geometric similarity),
while less
SP
scores are given for false positive presence.
Figure 7. Various evidences used for hypothesis verification
T
able
1. C
lassification
of
E
vidences
U
sed
for
H
ypothesis
S
coring
Evidence Type
(Abbreviation)
Description of Support
Evidence 1a –
Positive Pixel
Coverage
(SC)
Provides a measure of the overlap of wire-
frame model and image lines.
Evidence 1b –
Negative Pixel
Coverage
(SN)
Provides a measure of the lack of overlap of
wireframe model and image lines due to line
extraction failure caused by scene occlusions
from moving objects, shadows, etc.
Evidence 2 –
Line Presence
(SP)
Measures the total geometric similarity of all
image lines in contact with entire wireframe
model. This similar measure is conducted by
taking into account characteristics such as
length and angular similarity.
Evidence 3 – Virtual
Corner Presence
(SV)
Measure of contextual supports provided
by structurally-defined image corners in the
local scene.
852
November 2015
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


