orientation estimations as a result of continuous
SRO
updating
for both indoor and outdoor test datasets.
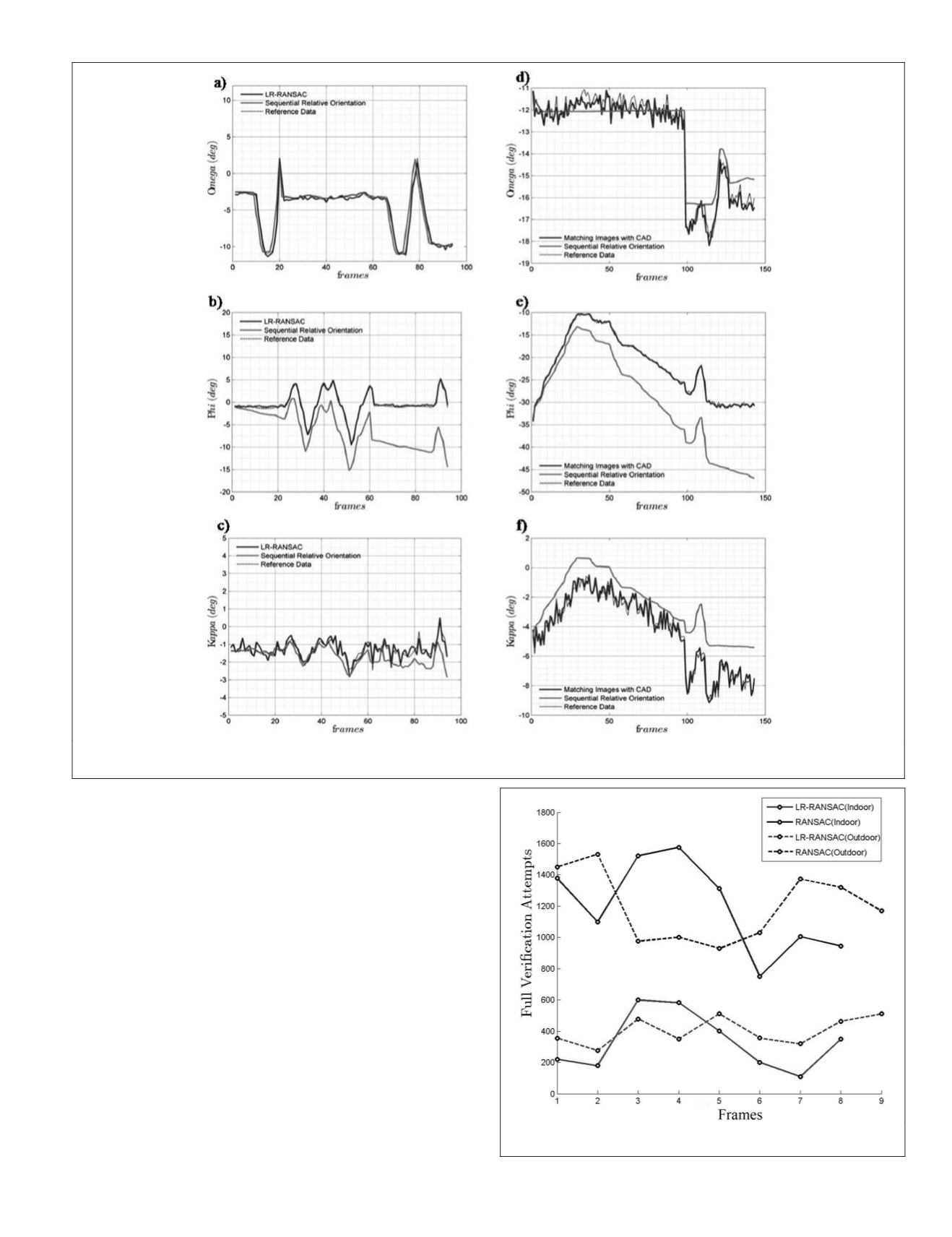
The general shape of the trajectories of the
SRO
rotation pa-
rameters are similar to those from
LR-RANSAC
and the parameters
of the reference data, which indicates that the relative angular
orientation between pairs of images have been reliably estimat-
ed. However, due to the sequential nature of
SRO
, we observe a
drifting of the rotational parameters during camera motion. This
is due to the accumulation of inherent errors from the estimated
parameters over time as the video sequence progresses.
Comparison of LR-RANSAC with RANSAC
The second comparison made is that of the proposed
LR-
RANSAC
with the classical
RANSAC
. Higher numbers of full
verification attempts directly affects algorithm run-time and is
detrimental for efficiency.
To compare
LR-RANSAC
’s performance with respect to
RANSAC
, an experiment was carried out on eight indoor frames
and nine outdoor frames (i.e., Figures 9 and 11, respectively).
RANSAC
(i.e., consisting of only the hypothesis generation and
verification steps) was used for line matching and compared
to
LR-RANSAC
. Both
RANSAC
and
LR-RANSAC
were run each of
a total of ten times on each frame. Figure 14 shows the mean
Figure 13. Camera rotation trajectories: Left Column: Indoor scene where (a) Omega (degrees), (b) Phi (degrees), (c) Kappa (degrees).
Right Column: Outdoor scene where (d) Omega (degrees), (e) Phi (degrees), and (f) Kappa (degrees).
Figure 14. LR-RANSAC versus RANSAC in terms of number of
hypothesis-verification attempts.
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
November 2015
857


