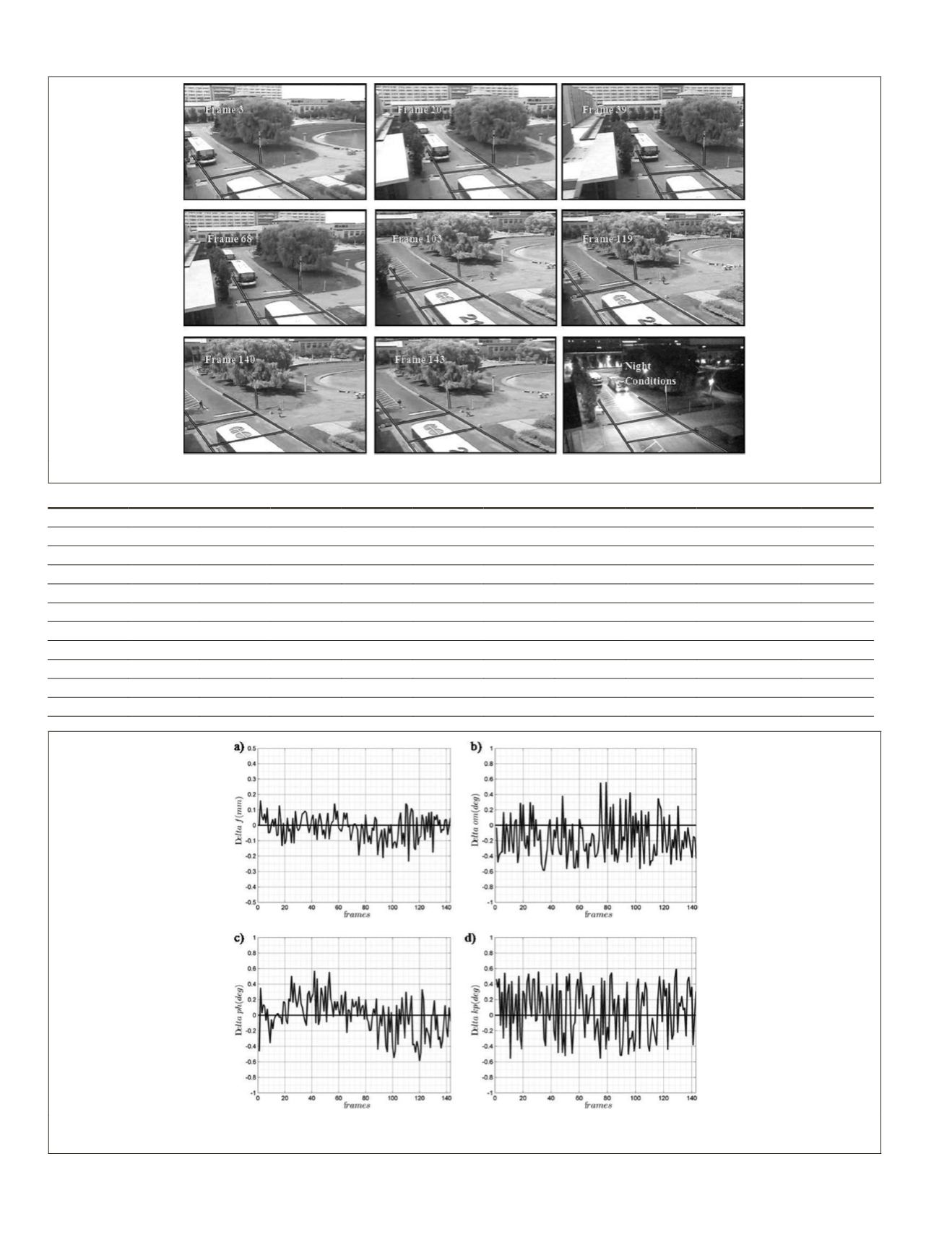
Figure 11. Outdoor scene: projected wireframe after refinement using line matching.
T
able
3. O
utdoor
S
cene
: E
stimated
V
alues
at
V
arious
F
rames
across
I
mage
S
equence
LR-RANSAC based camera parameters
frame
f(mm)
ω
°
φ
°
κ
°
σ
f
(mm)
σ
ω
°
σ
φ
°
σ
κ
°
RMSE
v
(pix)
σ
v
(pix)
3
3.34
-12.2
-30.2
-4.9
0.03
0.0108 0.0104 0.0219
2.52
2.66
20
3.50
-12.4
-17.4
-1.2
0.02
0.0056 0.0050 0.0160
1.52
1.74
39
3.58
-11.9
-11.2
-0.7
0.03
0.0096 0.0088 0.0309
1.32
1.98
68
3.56
-12.3
-18.4
-1.5
0.04
0.0072 0.0067 0.0150
1.76
1.88
103
3.53
-17.5
-27.3
-7.2
0.01
0.0073 0.0066 0.0137
0.38
0.88
119
3.45
-16.6
-30.6
-6.6
0.04
0.0065 0.0057 0.0103
1.62
1.72
140
4.05
-16.6
-30.0
-6.5
0.02
0.0055 0.0045 0.0153
2.94
2.55
143
3.62
-16.3
-30.0
-7.3
0.03
0.0070 0.0055 0.0174
1.58
1.90
Night cond.
3.61
-14.5
-21.8
-5.4
0.02
0.0039 0.0046 0.0125
2.36
2.12
Figure 12. Camera parameter errors using LR-RANSAC for Outdoor scene image sequence: (a) Focal length error (mm), (b) Omega error
(degrees), (c) Phi error (degrees), and (d) Kappa error (degrees)
856
November 2015
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


