Automatic Co-Registration of Pan-Tilt-Zoom (PTZ)
Video Images with 3D Wireframe Models
Ravi Ancil Persad, Costas Armenakis, and Gunho Sohn
Abstract
We propose an algorithm for the automatic co-registration of
Pan-Tilt-Zoom (
PTZ
) camera video images with 3
D
wireframe
models. The proposed method automatically retrieves chang-
ing camera focal length and angular parameters, due to the
motion of
PTZ
cameras by matching linear features between
PTZ
video images and 3
D
CAD
wireframe models. The devel-
oped feature-matching schema is based on a novel evidence-
based hypothesis-verification optimization framework referred
to as Line-based Randomized
RAN
dom
SA
mple Consensus
(
LR-RANSAC
).
LR-RANSAC
introduces a fast and stable pre-verifi-
cation test into the optimization process to avoid unnecessary
verification of erroneous hypotheses. An evidence-based veri-
fication follows to optimally select the
PTZ
camera parameters,
where an original line-based approach for full-verification,
-exploiting local geometrical cues on the image scene-, evalu-
ates the pre-verified hypotheses. Tests on an indoor dataset
produced a 0.06 mm error in focal length estimation and rota-
tional errors in the order of 0.18° to 0.24°. Experiments on the
outdoor dataset resulted in a 0.07 mm error for focal length
and rotational errors ranging from 0.19° to 0.30°.
Introduction
Indoor and outdoor video images from surveillance monitor-
ing systems are used in computer vision tasks such as event
detection and tracking moving objects (e.g., pedestrians and
vehicles) (Adam
et al
., 2008; Leibe
et al
., 2008). The projec-
tion of 2
D
object positions, detected from monocular single
images, into the 3
D
space is possible by determining the orien-
tation parameters of the camera with respect to the orthogonal
axes of 3
D
wireframe model. However, automatic estimation of
these parameters is critical, particularly for pan-tilt-zoom (
PTZ
)
surveillance cameras where the angular camera parameters
and the focal length change spontaneously with the camera
motion, while the position of the camera remains fixed. Our
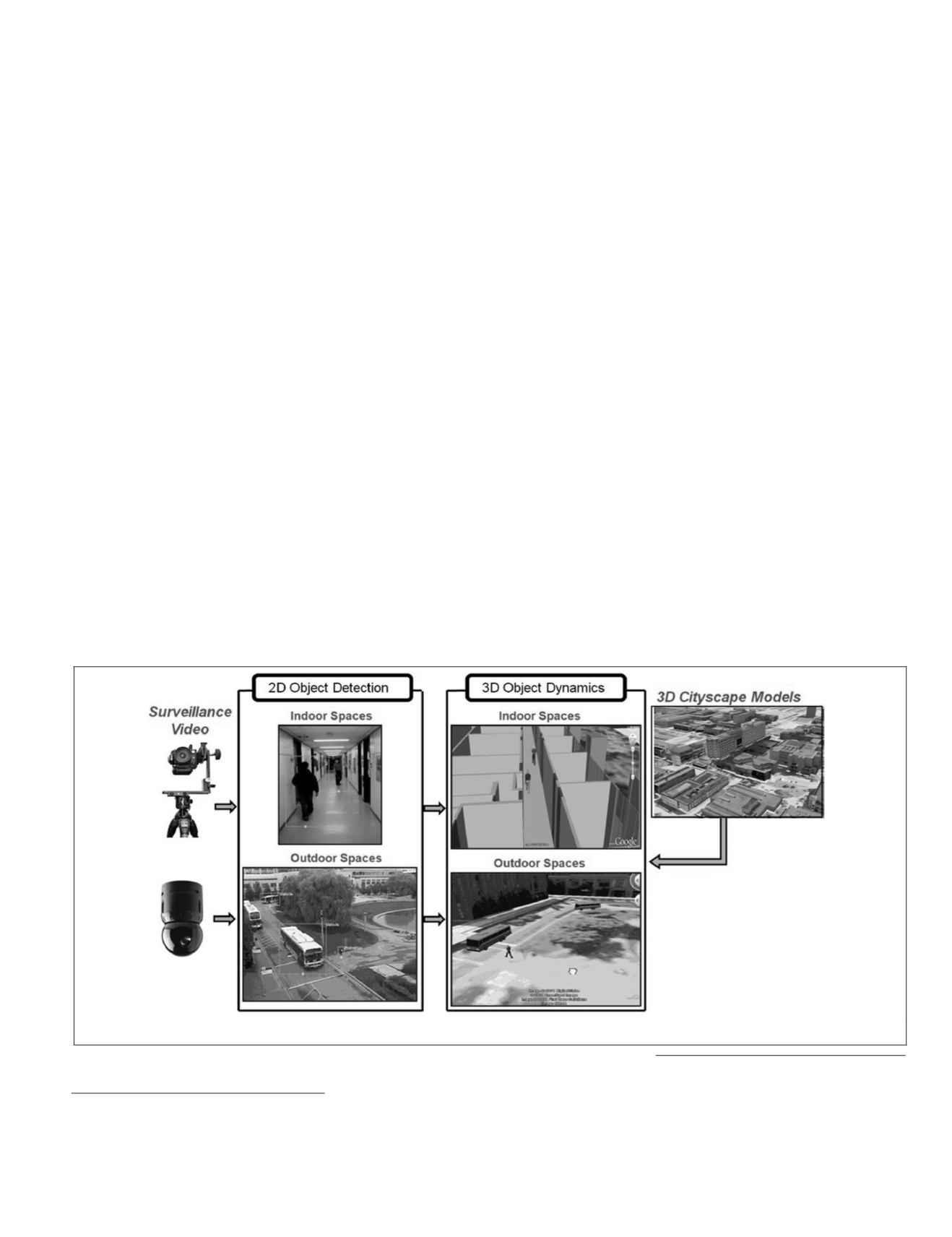
research work is motivated by the problem of image-based
automatic localization of dynamic objects for augmented real-
ity applications using surveillance cameras (Figure 1). Using
virtual 3
D
environments populated with building models of
3
D
cityscapes and road networks, avatars of pedestrians and
vehicles detected from 2
D
video can be rendered in the 3
D
en-
vironments. In related works (Baklouti
et al
., 2009; Kim
et al
.,
2009), the transformation parameters to move from 2
D
to 3
D
object positions are manually established. We introduce a new
approach for automatically estimating the parameters of
PTZ
surveillance cameras relative to the virtual 3
D
scene models.
This would enable the transformation of image positions of
moving objects into the virtual 3
D
environment during times
of camera motion. Using the wireframes of 3
D
scene models,
we match their 3
D
lines with corresponding 2
D
image lines.
Geomatics Engineering, GeoICT Lab, Department of Earth
and Space Science and Engineering, Lassonde School of
Engineering, York University, 4700 Keele Street, Toronto,
Ontario, M3J 1P3, Canada (
).
Photogrammetric Engineering & Remote Sensing
Vol. 81, No. 11, November 2015, pp. 847–859.
0099-1112/15/847–859
© 2015 American Society for Photogrammetry
and Remote Sensing
doi: 10.14358/PERS.81.11.847
Figure 1. Concept of video and 3D city models for augmented reality surveillance.
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
November 2015
847


