By optimally fitting the 3
D
model to the image frames from
PTZ
video, the camera parameters can be estimated.
The automatic estimation of camera parameters is a chal-
lenging problem. This is particularly true for
PTZ
cameras where
orientation parameters and focal length continuously change.
PTZ
cameras rotate around two axes. One axis, usually a vertical
one, allows for horizontal panning. The second axis, usually
the horizontal one, allows for vertical panning. In the
PTZ
axes
system, the direction of the optical axis is defined by the verti-
cal and horizontal angles. However, the direction of the optical
axis of the camera with respect to the 3
D
wireframe coordinate
system can be determined by estimating the three Euler angles
defining the angular displacement of the two systems.
Since
PTZ
cameras are mounted to a fixed position for most
surveillance applications, the camera location / translation is
considered to be a known and fixed parameter within the 3
D
model coordinate frame. However, the focal length is a function
of the
PTZ
camera’s zooming capabilities, while the pose angles
are a function of its rotations. Hence, we define our unknown
camera parameters to be the three rotational pose angles and
camera focal length. The standard collinearity equations are
used for the 3
D
to 2
D
camera perspective camera model, that is,
(a) the calibrated principal point is assumed to be at the image
center, and (b) lens distortion has not been considered.
Related Works
The challenge of 2
D
to 3
D
feature matching is a coupled prob-
lem. The first one being “the correspondence problem,” i.e.,
automatically knowing which feature matches to its corre-
sponding counterpart in 2
D
or 3
D
space. The second problem
is “the transformation problem,” i.e., the unknown parameters
required to map 3
D
features to their corresponding 2
D
features
or vice versa.
We use line segments instead of points due to their pre-
dominance in “built-up” scenes consisting mainly of building
structures. Feature matching using linear primitives has been
well utilized in photogrammetric computer vision, albeit from
the 2
D
image to 2
D
image matching-perspective (Schmid and
Zisserman, 1997; Taylor, 2002). However, there has been some
work in matching 3
D
model lines with 2
D
image lines (Habib
et al
., 2003; Jaw and Perny, 2008). Our work contributes to
this progression with a newly proposed 3
D
to 2
D
line match-
ing framework.
In the early 1980’s, numerous feature matching strategies
such as
RANSAC
(Fischler and Bolles, 1981) were developed
when model-based object recognition systems came into use.
In recent years, with the increasing use of machine learning
theory, appearance-based object recognition (Roth and Winter,
2008) has somewhat superseded model-based object recog-
nition. However, with the advent of new data acquisition
technologies such as airborne and terrestrial laser scanning
systems, databases of stored 3
D
geospatial models are read-
ily available. This facilitates the use of model-based vision
techniques for various applications.
Using the classical interpretation tree method (Grimson
and Lozano-Perez, 1987), Aider
et al
. (2005) put forward a
model-based line matching solution to address online local-
ization for a mobile indoor robot equipped with a single-view
camera. Wang and Neumann (2009) presented an automatic
registration solution of aerial images to airborne lidar data
for generating photo-realistic 3
D
models. Three extracted
line segments were linked together to form a so-called “
3CS
”
(3 connected segments) feature and were used in the match-
ing process. They proposed a “two-level
RANSAC
” algorithm,
which combined a local and global
RANSAC
solution for the
registration. Our paper addresses the automatic co-registration
of
PTZ
video images with 3
D
CAD
models. We apply a model-
based vision approach for the automatic retrieval of the
continuously changing focal length and angular parameters of
the
PTZ
image sequence.
Methodology
The mapping and thus registration of a 3
D
CAD
model with
PTZ
video images is established through the estimation of
camera focal length and rotation angles for each image frame
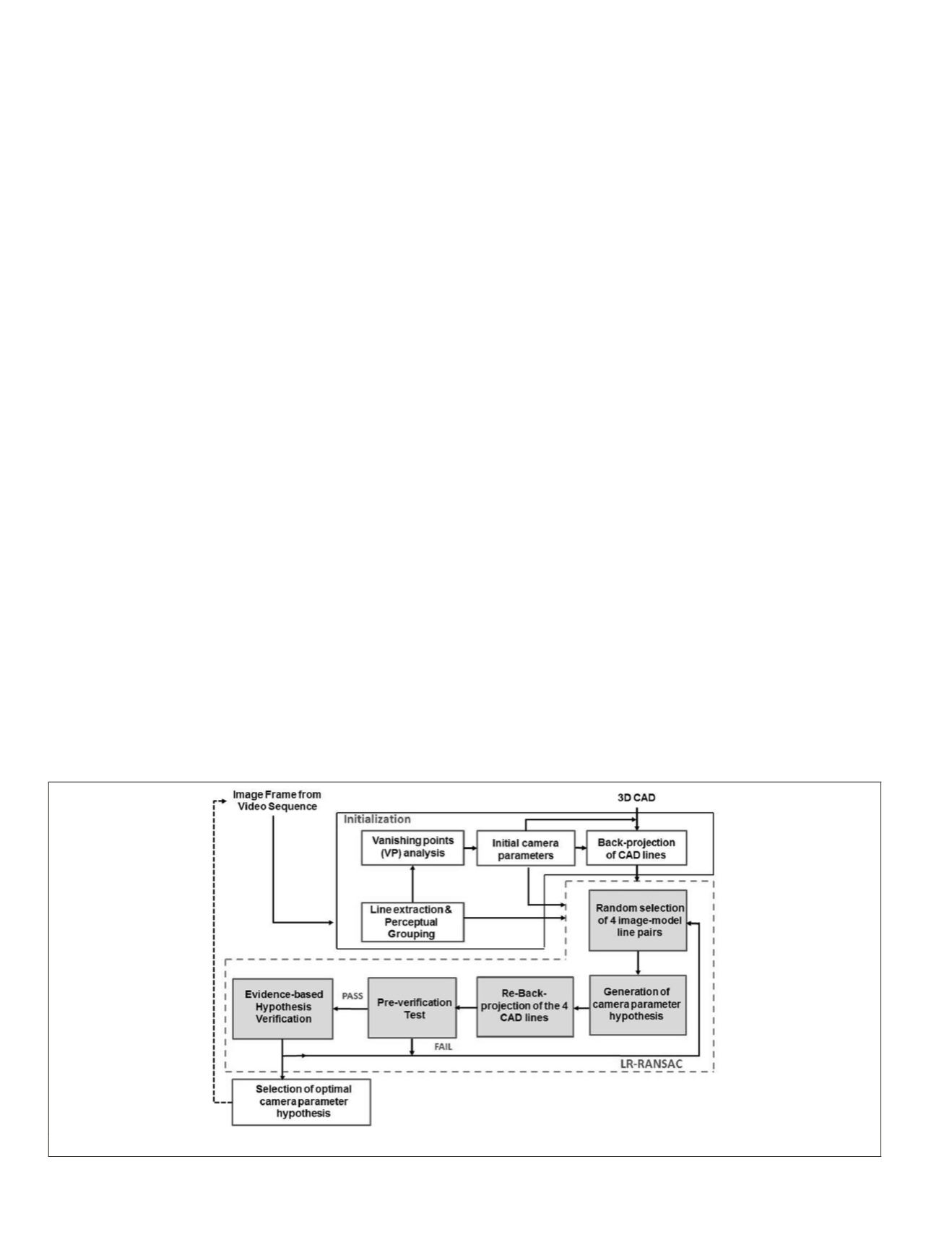
of the surveillance video sequence. Figure 2 illustrates the
proposed methodology.
The proposed approach consists of two main stages: the
initialization and the Line-based Randomized
RANSAC
(
LR-
RANSAC
). During the initialization stage initial camera param-
eters are estimated based on the vanishing point geometry,
and thus enabling the back projection of the wireframe model
lines
LM
into image space. During this stage the image lines
LI
are also extracted. To obtain a suitable registration between
the wireframe model and image lines, explicit correspon-
dences must be established between
LM
and
LI
. Based on this
Figure 2. General framework of proposed method
848
November 2015
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


